Inteligentní roboti vnímají své okolí a reagují na něj. Potřebují k tomu senzory, které simultánně zachycují různé fyzikální události. Vědci v Ústavu technologií v Karlsruhe (Karlsruher Institut für Technologie – KIT) vyvinuli multimodální senzory, které detekují jak pohyby, tak doteky a ideálně doplňují optické systémy.
Roboti mohou místo člověka vykonávat monotónní, těžké nebo nebezpečné práce. Jejich využití se už prosadilo v mnoha oblastech hospodářské činnosti, v průmyslové výrobě, údržbě, logistice nebo zemědělství. Inteligentní robot se vyznačuje tím, že vnímá své okolí a reaguje na něj. Může tak provádět komplexní úkoly, například uchopovat neznámé objekty a přitom při bezpečné interakci s člověkem flexibilně jednat. Inteligentní roboti k tomu potřebují senzory, které jim zprostředkují informace o jejich okolí. Tak jako člověk využívá současně různé smysly a v mozku spojuje vjemy do celkového obrazu, musí být inteligentní robot schopný prostřednictvím tak zvané multimodální senzoriky simultánně zachycovat různé fyzikální události a vyhodnocovat je. Stacionární a mobilní roboty jsou k optickému vnímání okolí často vybaveny 2D nebo 3D kamerami a laserovými scannery. Přesnost těchto optických systémů je mnohdy nepříznivě ovlivněna špatnými světelnými podmínkami nebo objekty, které je zakrývají. Vědci z Ústavu atropomatiky a robotiky – Inteligentní automatizace procesů a robotiky (IPR) (Institut für Anthropomatik und Robotik – Intelligente Prozessautomation und Robotik (IAR – IPR)) Ústavu technologií v Karlsruhe (Karlsruher Instituts für Technologie – KIT) vyvinuli senzory, které doplňují zavedené optické systémy.
Doplňkové senzory na ramenech a chapadlech robotů plní většinou jednu funkci. Detekují buď pohyby přiblíženého objektu, nebo dotyky ve formě tlaku. U „kapacitních taktilních senzorů přiblížení“, které byly vyvinuty v Ústavu technologií v Karlsruhe (Karlsruher Instituts für Technologie – KIT), jsou obě funkce spojeny. Roboty vnímají jak pohyby, tak dotyky, v případě potřeby i obojí současně.
Jednotlivý senzorový modul se skládá ze tří vrstev: Plochá elektroda tvoří nejspodnější vrstvu. Komprimovatelný materiál, například pěnová hmota, tvoří izolační mezivrstvu. Nejhornější vrstva je složená z několika geometrických, pravidelně uspořádaných krycích elektrod. Podle způsobu použití jsou možné různé počty a různý tvar variant krycích elektrod. Řídící elektronika může být zabudována v prostoru odděleném od senzorových modulů. Senzorové moduly se mohou používat jednotlivě nebo propojené s několika moduly jako senzorové systémy. Pokud se objekt blíží k robotu, mění se elektrické pole, které senzor obklopuje. Tato informace je vyhodnocována jako informace o přiblížení. Senzor tak detekuje pohyby. Doteky naproti tomu, které vedou k mechanické komprimaci mezivrstvy, jsou zachycovány jako změna elektrické kapacity mezi elektrodami.
„Krycí detektory je možno libovolně spojovat,“ vysvětlil nám profesor Björn Hein, vedoucí skupiny Inteligentní průmyslové roboty Ústavu atropomatiky a robotiky – Inteligentní automatizace procesů a robotiky (IPR) (Institut für Anthropomatik und Robotik – Intelligente Prozessautomation und Robotik (IAR – IPR)) Ústavu technologií v Karlsruhe. „Podle situace je tak možno nalézt vhodný kompromis mezi dosahem a místním rozlišením.“ Senzorové moduly lze propojovat do senzorových ploch různých velikostí – od malých ploch u chapadel až po velkoplošnou kůži robotů.
S kapacitními taktilními senzory přiblížení je možno výrazně zvyšovat flexibilitu a agilitu automatizované průmyslové výroby. Taktilní senzory mimoto zlepšují bezpečnost interakce člověk‑stroj: Detekují a lokalizují přibližující se osoby a vytvářejí varovné signály, jakmile nastane překročení nadefinovaných bezpečnostních vzdáleností. Rychlost provádění úlohy se sníží nebo je robot dokonce zastaven. Taktilní senzory přiblížení mohou být významným příspěvkem k bezpečné spolupráci člověka a robota, při které pracují člověk i robot současně na stejném obrobku.
Na veletrhu HANNOVER MESSE 2018, který bude probíhat 23. – 27. dubna, ukážou zástupci Ústavu technologií z Karlsruhe (KIT) v rámci mezinárodní přehlídky „Research & Technology“ věnované výzkumu, vývoji a technologickému transferu na stánku B16 v hale č. 2, jaké možnosti přinášejí kapacitní taktilní senzory přiblížení. Ústav KIT bude zastoupen také v hale č. 27 (Energy) na stánku K51 a dalších tematických stáncích.
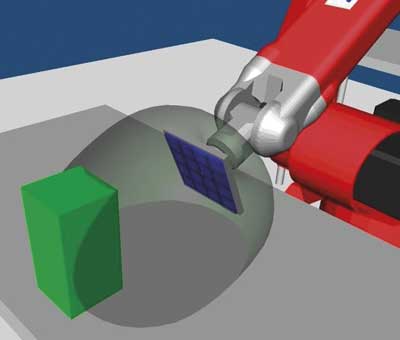
Pomocí kapacitních dotykových snímačů přiblížení může robot prozkoumat své okolí nebo neznámé objekty v životním prostředí (Stefan E. Navarro)
HANNOVER MESSE – Get new technology first! HANNOVER MESSE je přední světový průmyslový veletrh. Svými vedoucími tématy „Integrated Industry“ a „Integrated Energy“ je globální platformou pro průmysl 4.0. Příští veletrh se koná 23. – 27. dubna 2018 v Hannoveru. Pět vedoucích veletrhů podrobně představí digitalizaci výroby a energetické systémy – Integrated Automation, Motion & Drives, Digital Factory, Energy, Industrial Supply a Research & Technology. Na hannoverském výstavišti souběžně proběhne veletrh CeMAT, vedoucí světový veletrh pro intralogistiku a Supply Chain Management. Partnerskou zemí veletrhu HANNOVER MESSE 2018 je Mexiko.